Full Text:
![]() <3727>
<3727>
Summary: ![]() <2572>
<2572>
CLC number: TM911.4
On-line Access: 2024-08-27
Received: 2023-10-17
Revision Accepted: 2024-05-08
Crosschecked: 2014-09-29
Cited: 1
Clicked: 11600
Control-oriented dynamic identification modeling of a planar SOFC stack based on genetic algorithm-least squares support vector regression
| ||||||||||||||
Hai-bo Huo, Yi Ji, Xin-jian Zhu, Xing-hong Kuang, Yu-qing Liu. Control-oriented dynamic identification modeling of a planar SOFC stack based on genetic algorithm-least squares support vector regression[J]. Journal of Zhejiang University Science A, 2014, 15(10): 829-839.
@article{title="Control-oriented dynamic identification modeling of a planar SOFC stack based on genetic algorithm-least squares support vector regression",
author="Hai-bo Huo, Yi Ji, Xin-jian Zhu, Xing-hong Kuang, Yu-qing Liu",
journal="Journal of Zhejiang University Science A",
volume="15",
number="10",
pages="829-839",
year="2014",
publisher="Zhejiang University Press & Springer",
doi="10.1631/jzus.A1400011"
}
%0 Journal Article
%T Control-oriented dynamic identification modeling of a planar SOFC stack based on genetic algorithm-least squares support vector regression
%A Hai-bo Huo
%A Yi Ji
%A Xin-jian Zhu
%A Xing-hong Kuang
%A Yu-qing Liu
%J Journal of Zhejiang University SCIENCE A
%V 15
%N 10
%P 829-839
%@ 1673-565X
%D 2014
%I Zhejiang University Press & Springer
%DOI 10.1631/jzus.A1400011
TY - JOUR
T1 - Control-oriented dynamic identification modeling of a planar SOFC stack based on genetic algorithm-least squares support vector regression
A1 - Hai-bo Huo
A1 - Yi Ji
A1 - Xin-jian Zhu
A1 - Xing-hong Kuang
A1 - Yu-qing Liu
J0 - Journal of Zhejiang University Science A
VL - 15
IS - 10
SP - 829
EP - 839
%@ 1673-565X
Y1 - 2014
PB - Zhejiang University Press & Springer
ER -
DOI - 10.1631/jzus.A1400011
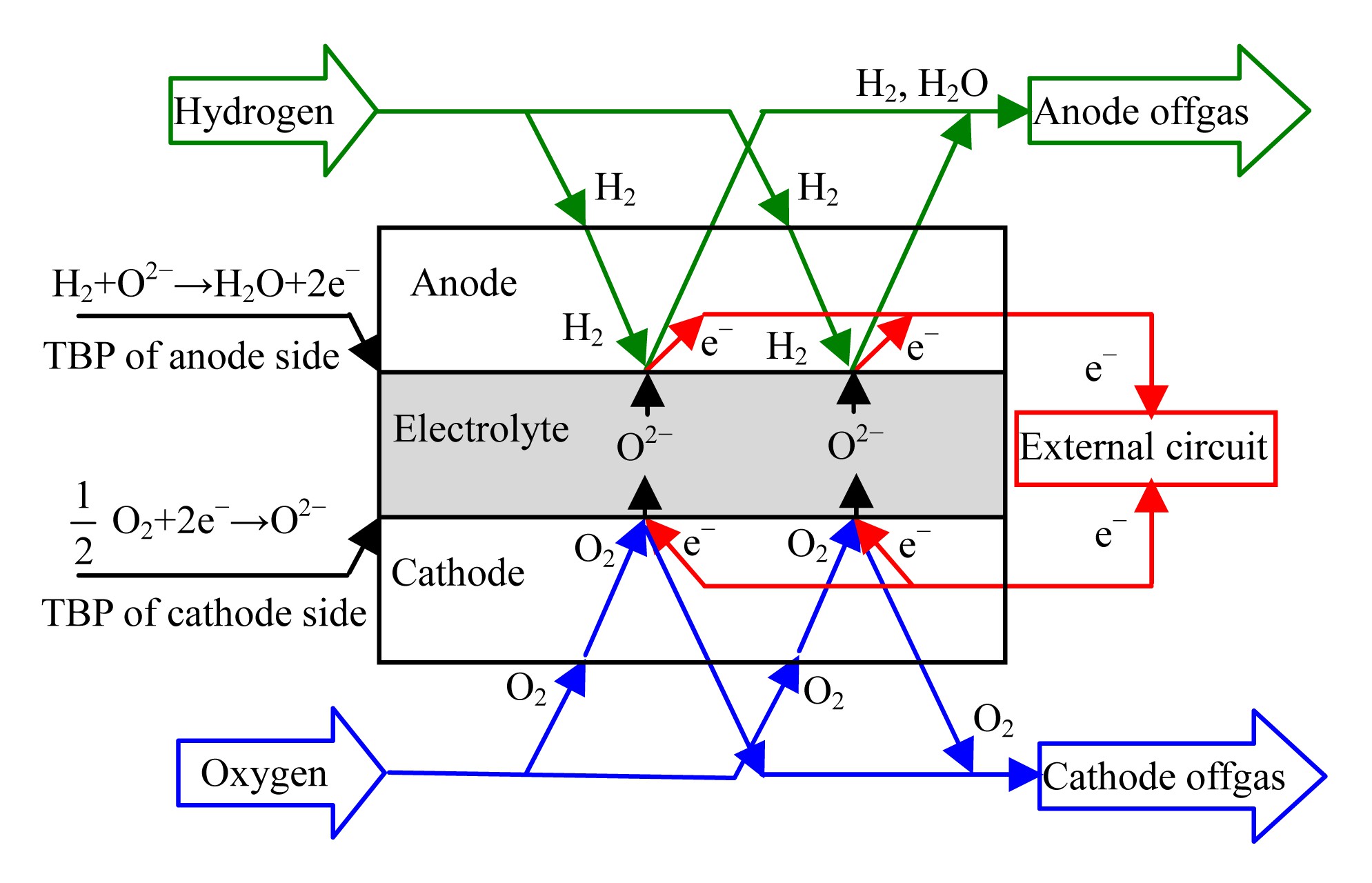
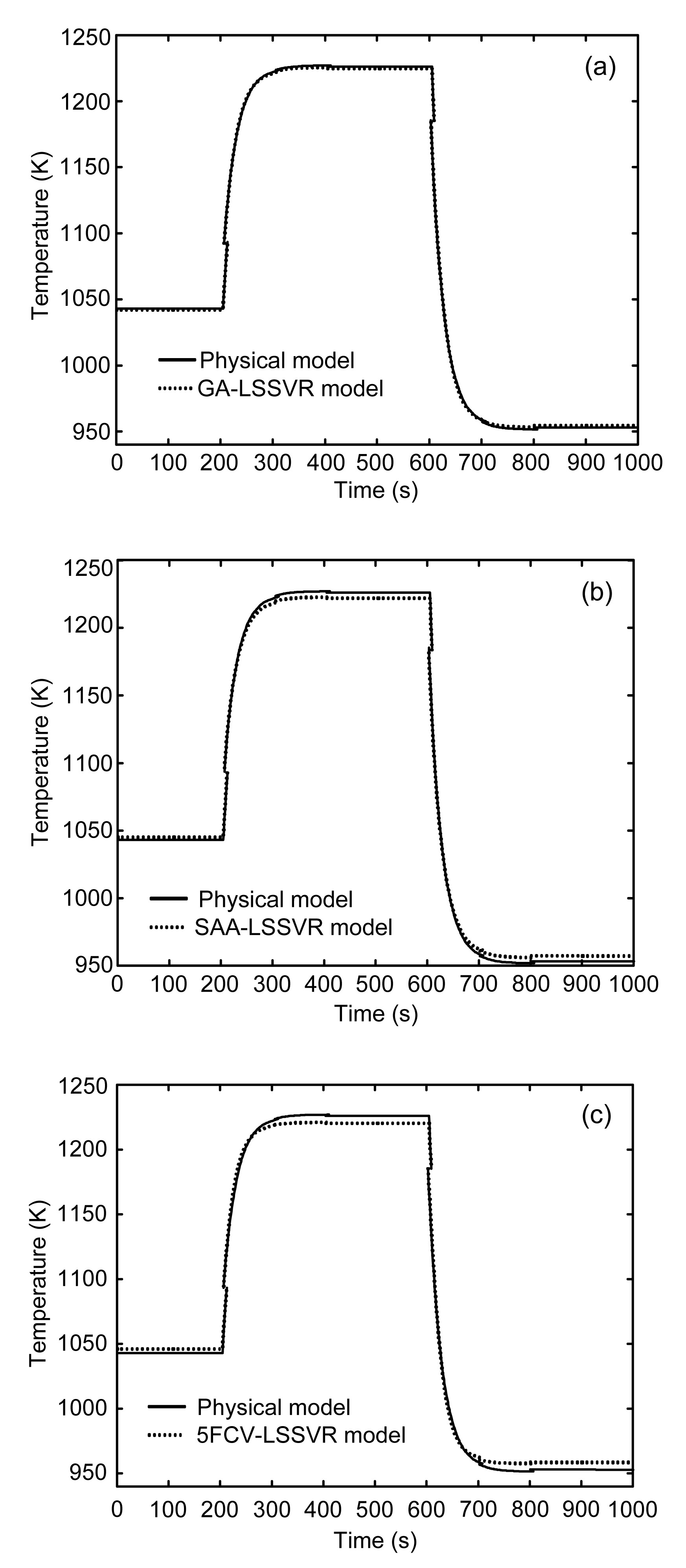
Abstract: For predicting the voltage and temperature dynamics synchronously and designing a controller, a control-oriented dynamic modeling study of the solid oxide fuel cell (SOFC) derived from physical conservation laws is reported, which considers both the electrochemical and thermal aspects of the SOFC. Here, the least squares support vector regression (LSSVR) is employed to model the nonlinear dynamic characteristics of the SOFC. In addition, a genetic algorithm (GA), through comparing a simulated annealing algorithm (SAA) with a 5-fold cross-validation (5FCV) method, is preferably chosen to optimize the LSSVR’s parameters. The validity of the proposed LSSVR with GA (GA-LSSVR) model is verified by comparing the results with those obtained from the physical model. Simulation studies further indicate that the GA-LSSVR model has a higher modeling accuracy than the LSSVR with SAA (SAA-LSSVR) and the LSSVR with 5FCV (5FCV-LSSVR) models in predicting the voltage and temperature transient behaviors of the SOFC. Furthermore, the convergence speed of the GA-LSSVR model is relatively fast. The availability of this GA-LSSVR identification model can aid in evaluating the dynamic performance of the SOFC under different conditions and can be used for designing valid multivariable control schemes.
(1) All the gases are considered as ideal gases;
(2) The internal operating pressure is constant;
(3) Both anode and cathode channel exhaust gases pass through a single “choked” orifice;
(4) Temperature in the SOFC stack is uniform;
(5) The fuel and air temperatures at the exit of both channels are equal to the inside temperatures;
(6) Heat exchange between the stack and the ambient environment is not taken into account.
| Item | Value |
| Cell area (cm2) | 100 |
| Electrode thickness (mm) | 0.25 |
| Interconnector thickness (mm) | 1.5 |
| Electrode density (g/cm3) | 6.6 |
| Interconnector density (g/cm3) | 6.11 |
| Fuel channel height (mm) | 1 |
| Air channel height (mm) | 1 |

| Item | Value |
| N 0 | 384 |
| T in (K) | 973 |
| I rate (A) | 500 |
| E 0 (V) | 1.18 |
| K H2 (mol/(s·atm)) | 0.843 |
| K O2 (mol/(s·atm)) | 2.52 |
| K H2O (mol/(s·atm)) | 0.281 |
| τ H2 (s) | 26.1 |
| τ O2 (s) | 2.91 |
| τ H2O (s) | 78.3 |
| r (Ω) | 0.126 |
| |
5 |
| |
10 |
| |
−0.2418×106 |
| |
0.4 |

| Model type | MRE |
|
| Stack voltage (V) | Operating temperature (K) | |
| GA-LSSVR | 0.0935 | 0.1039 |
| SAA-LSSVR | 0.1174 | 0.3149 |
| 5FCV-LSSVR | 0.1432 | 0.4150 |
| Model type | RMSE |
|
| Stack voltage (V) | Operating temperature (K) | |
| GA-LSSVR | 0.7823 | 1.8641 |
| SAA-LSSVR | 0.8952 | 3.6504 |
| 5FCV-LSSVR | 10.4085 | 4.7680 |
| Model type | Prediction time (s) |
|
| Stack voltage | Operating temperature | |
| GA-LSSVR | 416.6730 | 133.3348 |
| SAA-LSSVR | 370.8479 | 186.0621 |
| 5FCV-LSSVR | 563.6533 | 518.5528 |


Open peer comments: Debate/Discuss/Question/Opinion
<1>